
Mblock Programı ile Mbot Projeleri yani En iyi mBot Uygulamalarını yapmaya çalışacağız. Park Sensörlü Araba Projesine geçmeden önce mBot tanıtımını yaptığım sayfama MakeBlock – MBot Kullanımı adresinden ulaşabilirsiniz.
İlgili sayfayı incelediğinizde etkinlikleri yapabilmek için gerekli programdan bahsetmiştim. Bu program bilgisayarımızda yüklü olmadan maalesef etkinlikleri yapamayız. MBlock Programı bilgisayarınızda yüklü değilse MakeBlock – MBot Kullanımı sayfasından faydalanarak Programı bilgisayarınıza yükleyin.
Bu etkinlik değil ama interaktif etkinlikler yapmak için Online Mblock Editör sayfasını ziyaret edebilirsiniz.
Eğer programınız ve bağlantınız tamam ise hemen yeni uygulamamıza başlayalım.
MBOT PARK SENSÖRLÜ ARABA
Bu dersimizde Park Sensörü çalışma mantığı, Ultrasonik sensör ile mesafe ölçme konularını öğreneceğiz.
Arkadaşlar bu bölümde artık yeni bir şey öğrenmeyeceğiz. Sadece bildiklerimiz ile neler yapabiliyoruz onu göreceğiz. Bu kapsamda park sensörü yapmaya çalışacağız.
Öncelikle daha önceki bölümde yaptığımız yön tuşları ile robotumuzu hareket ettirme kodlarını ekleyelim.
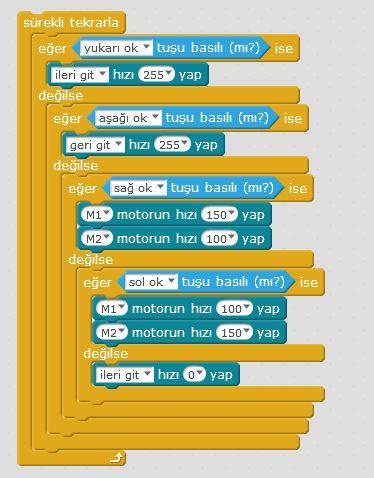
Evet yukarıdaki kodları oluşturarak MBOT’umuzu klavye ile kontrol edebilir kodları ekledik. Artık yukarı ok tuşuna basınca ileri, aşağı ok tuşuna basınca geri, Sağ ok tuşuna basınca sağa, sol ok tuşuna basınca sola gidecek. Herhangi bir tuşa basmadığım zaman MBOT duracak.
Biraz süsleyelim ve sağa sola dönüşlerde LED yakma özelliği ekleyelim.
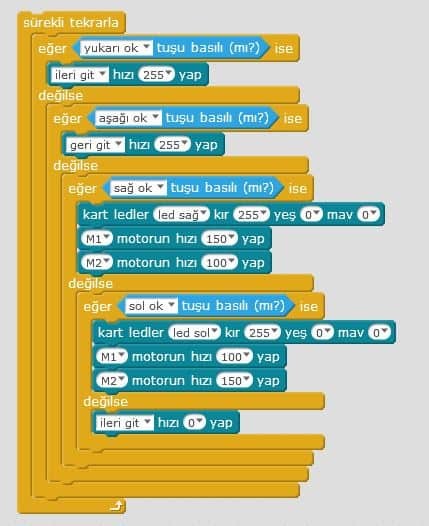
Eklediğimiz yeni özellikle MBOT sola dönünce Sol LED sağa dönünce Sağ LED yanacaktır. Öğrendiğimiz bir özelliği daha kullanmış olduk. Şimdi birde ultrasonik mesafe sensörünü ve Buzzer’ı işe dahil edelim.
Engele olan mesafe 30 cm’nin altına düşünce arabamız alarm vermeye başlasın. 20 cm’nin altına düştüğünde ise ses daha sıklaşsın. 10 cm’nin altına düştüğünde ise daha sıklaşarak uyarının şiddetini artırsın.

Evet alarm kodunuda ekledik. Şimdi kodlarımızı birleştirelim ve Park Sensörlü Arabamıza son halini verelim.
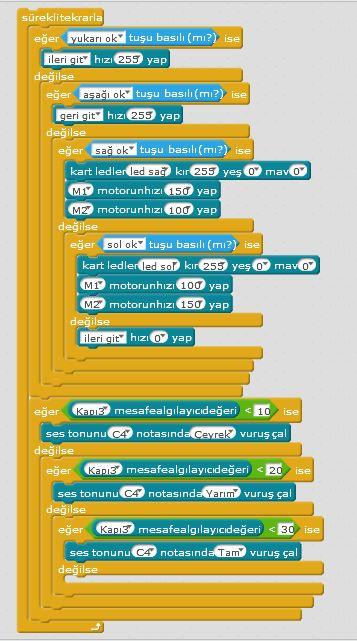
İki kodumuzu yukarıdaki gibi sürekli tekrar içinde birleştirdik. Bunun üzerine Yeşil Bayrağa Tıklandığında kodu ekleyelim ve artık Park Sensörlü Arabamız hazır.
Bizim yapacaklarımız bu kadar ama siz bu bildiklerinizin üzerine eklemeler yapabilirsiniz. Aşağıdaki ek görevleri yapmaya çalışın.
Ek Görev:
# Ailenizin veya bir yakınınızın arabasında park sensörü çalışmasını izleyin.
# 7 parçalı ekran temin ederek, park arabalarda olduğu gibi park esnasında engele olan mesafeyi o ekrana sürekli zamanlı olarak yazdırın.
# Kendinize kartondan bir parkur çizerek o parkuru tamamlamaya çalışın.
# Robotu geri geri park etmeyi deneyin.
Bu etkinliği bitirdiyseniz MBOT ile Kodlama Eğitimi sayfasındaki etkinlikleri yaparak Robotik Kodlamaya Öğrenmeye devam edebiliriz.

Açılan sayfadaki yönergeye uygun olarak hareket ederek MBOT ile çok güzel projeler ortaya çıkarabilirsiniz. Daha sonra bu öğrendiklerimiz ile Arduino ile Kodlama Eğitimi alabilir ve Robotik Kodlama alanında kendinizi geliştirebilirsiniz.
Hocam size çoook teşekkür ederim. O kadar bilgisayar ve robotla ilgili bölüm mezunlarının veremediği cevapları sayenizde buldum. Artık sizi takip edeceğim.
Teşekkür ederim elimizden geldiğince yardımcı olmaya çalışıyoruz. Size de yardımcı olabildiysek ne mutlu
aynı kod blokları oluşturdum lakin şöyle bir sorun yaşadım arabayı park ederken buzzer çalıştığında yani eğer koşuluna girdiğinde yön tuşları bırak komutu yani motor dur komutunu geç algılıyor ve mbot gitmeye devam ediyor bu sorunun çözümü varmı?
Hocam klavye tuşlarını kullandığımız için interaktif bir uygulama. Bu tarz uygulamalarda tepki süresi maalesef oluyor. Eğer yönetim işini klavye den kaldırıp başka bir şekilde yapar ve kodları kart içine yüklerseniz direk net sonuçlar alabilirsiniz.