
Mblock Programı ile Mbot Projeleri yani En iyi mBot Uygulamalarını yapmaya çalışacağız. Engelden Kaçan Robot Projesine geçmeden önce mBot tanıtımını yaptığım sayfama MakeBlock – MBot Kullanımı adresinden ulaşabilirsiniz.
İlgili sayfayı incelediğinizde etkinlikleri yapabilmek için gerekli programdan bahsetmiştim. Bu program bilgisayarımızda yüklü olmadan maalesef etkinlikleri yapamayız. MBlock Programı bilgisayarınızda yüklü değilse MakeBlock – MBot Kullanımı sayfasından faydalanarak Programı bilgisayarınıza yükleyin.
Bu etkinlik değil ama interaktif etkinlikler yapmak için Online Mblock Editör sayfasını ziyaret edebilirsiniz.
Eğer programınız ve bağlantınız tamam ise hemen yeni uygulamamıza başlayalım.
MBOT ENGELDEN KAÇAN ROBOT
Bu dersimizde Ultrasonik Sensörün Çalışma Mantığı, Yarasaların ses dalgalarını kullanarak yollarını nasıl belirledikleri, Ses hızı, Mesafe hız ve süre arasındaki ilişki(Yol Denklemi) konularını öğreneceğiz.
Bilgi: Görme işlemi, ışığın cisimler üzerinden yansıması ve gözümüz tarafından alınarak beyinde işlenmesi sonucu oluşur. Ses dalgaları da ışık gibi benzer olarak cisimler üzerinden yansıyabilir. Yani daha gelişmiş kulaklara sahip olsaydık, gözlerimi yerine kulaklarımızla görebilirdik. Biraz renksiz olsa da 🙂
Ultrasonik Mesafe Sensörü
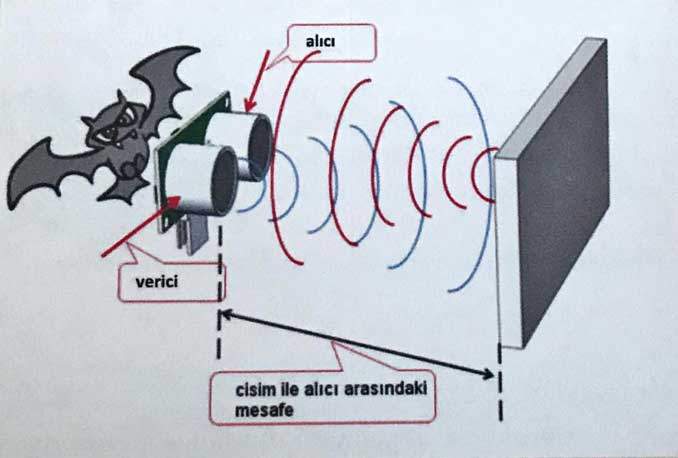
Ultrasonik Mesafe Sensörleri en yakınlarındaki cisim ile aralarıdaki mesafeyi ses dalgaları aracılığyla tespit eden sensörlerdir. Göz gibi duran bu cisimlerden biri verici diğeri alıcıdır. Vericiden gönderilen ses dalgası, karşısında duran cisme çarpar ve yansır. Yansıyan ses dalgası alıcı tarafından yakalanır. Bu arada geçen süre tutulduğundan Yol = Hız x Zaman formülü yardımıyla hesaplanır.
Bilgi: Ses hızı saniyede 343 metredir. Yani yaklaşık olarak saatte 1235 kilometre eder.
Şekilde görüldüğü gibi yarasa her yöne ses dalgaları yollar ve duvarlara çarpan ses dalgaları tekrar yarasaya döner. yarasanın beyninde bulunan özelleştirilmiş sistem, mesafeyi doğrudan algılar. Ultrasonik mesafe sensöründe ise bu hesap az önce vermiş olduğum yol = hız x zaman formülü ile bulunur.
Gelelim MBOT üzerinde bulunan Mesafe sensörüne. Bu sensörümüzün yaklaşık ölçüm aralığı 0 ile 4 metre aralığındadır. Yani maksimum 400 olarak değer alabilir.
Peki biz bu değeri nasıl kullanacağız. Robotlar menüsü altında ….. mesafe algılayıcı değeri kod bloğu yardımıyla kullanacağız.
Hemen bir örnek ile mesafe değerimizi bir önceki etkinlikte ışık değerini aldığımız gibi alıp pandaya söylettirelim.

Yukarıdaki kod bloğunu yazdım ve MBOT üzerinde bulunan ultrasonik mesafe sensörümün aldığı değeri pandaya söylettirdim. Şimdi bu değerle birlikte engelden kaçan robot yapımına başlayabilirim.
ENGELDEN KAÇAN ROBOT
Öncelikle algoritmamızı belirleyelim. Biz bir labirenti falan çözmeyeceğiz sadece robotumuzun engeli gördüğü an yön değiştirmesini isteyeceğiz. Bu yön herhangi bir yön olabilir. Ben örneğimde sağ yönünü kullanacağım.
Yani diyeceğim ki önünde engel yok ise düz ilerle, eğer bir engele rastlarsan sağa dön.
Yukarıdaki cümlede gördüğünüz gibi bir koşul var. O halde daha önce Scratch konularında da öğrendiğim Eğer ve değilse kodunu kullanacağım.
Birde engelin mesafe aralığını belirlemek için büyüktür küçüktür işaretini kullanacağım. Ben engel mesafesi olarak 15 cm seçiyorum. O halde başlayalım kodlarımıza.

Evet kodlarımızın hepsi bu kadar. Videosuna bakalım nasıl olmuş.
Bu işlemi aslında kumandanın bir tuşuna basarak MBOT’uma yaptırabilirdim. Fakat önemli olan kodları ve çalışma mantıklarını öğrenmekti. Güzel bir eğitim oldu. İlerde yapacağımız Arduino etkinliklerinde en çok bu sensörü kullanacağımızı hatırlatmak isterim.
İnternette bir çok arduino projesini sadece mesafe sensörü ile yapılığını inceledikçe farkedeceksiniz.
Bizim yapacaklarımız bu kadar ama siz bu bildiklerinizin üzerine eklemeler yapabilirsiniz. Aşağıdaki ek görevleri yapmaya çalışın.
Ek Görev:
# Robotun tepki vereceği mesafe değerini değiştirerek olacakları gözlemleyin.
# Engel gördüğünde üzerindeki LED’ler ile uyarı veren ve mümkünse engelin etrafından dönen bir robot yapalım.
# Ultrasonik sensör sayısını artırarak etrafı engellerle dolu bir yolda yolu takip eden bir robot yapalım.
Bu etkinliği bitirdiyseniz MBOT ile Kodlama Eğitimi sayfasındaki etkinlikleri yaparak Robotik Kodlamaya Öğrenmeye devam edebiliriz.

Açılan sayfadaki yönergeye uygun olarak hareket ederek MBOT ile çok güzel projeler ortaya çıkarabilirsiniz. Daha sonra bu öğrendiklerimiz ile Arduino ile Kodlama Eğitimi alabilir ve Robotik Kodlama alanında kendinizi geliştirebilirsiniz.
İlk yorum yapan olun